Criando a sua própria Lixeira Inteligente: Protótipo do Circuito Eletrônico da Lixeira (Parte 3)

Finalmente temos a terceira e última parte do nosso Artigo sobre a construção da Lixeira Inteligente. Vamos finalizar a construção da sua própria Lixeira Inteligente? Clique aqui e finalize já a sua!
Criando a sua própria Lixeira Inteligente: Protótipo do Circuito Eletrônico da Lixeira (Parte 2)
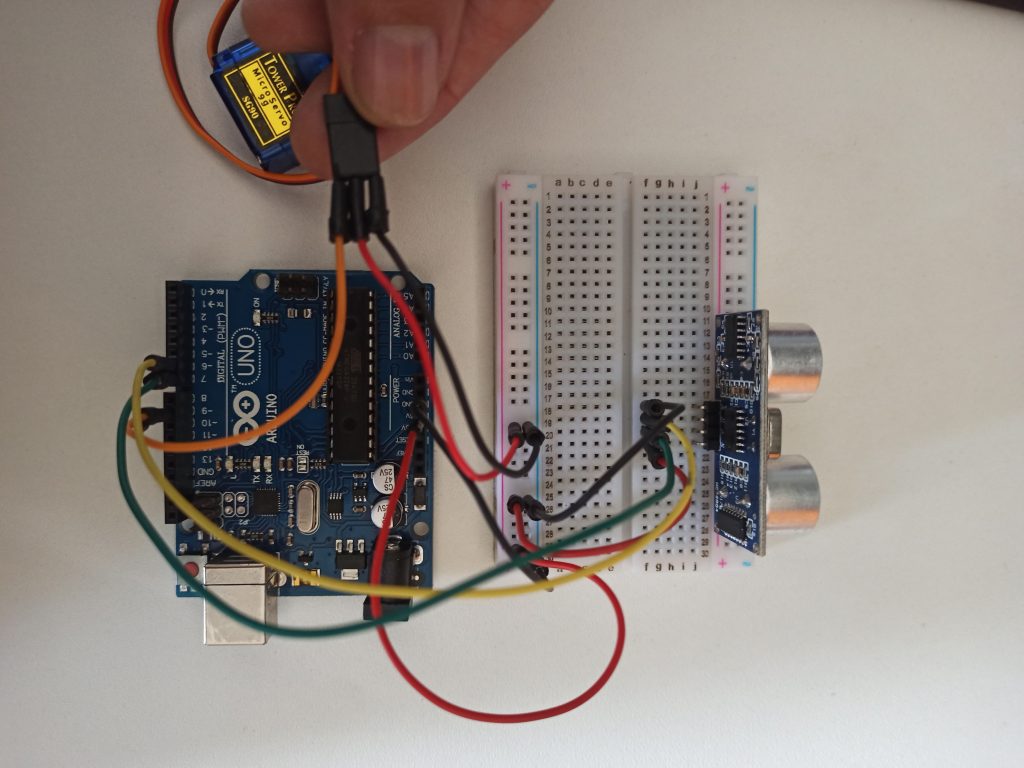
Daremos continuidade à nossa série sobre a construção da Lixeira Inteligente, que será composta por três artigos. Nessa Parte 2, iremos explanar sobre a montagem real do circuito eletrônico da Lixeira, atestando o seu funcionamento na prática.
Criando a sua própria Lixeira Inteligente: Programação e simulação com Arduino e Tinkercad (Parte 1)
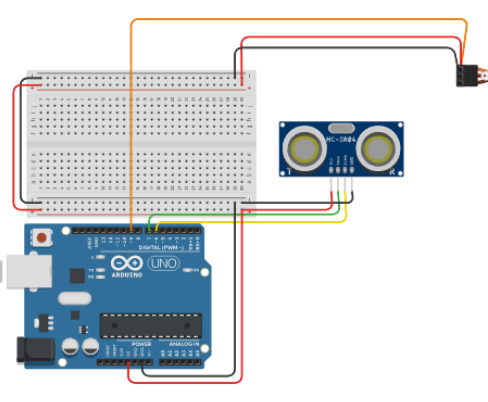
Neste primeiro artigo referente ao projeto da Lixeira Inteligente, você aprenderá como programar e simular o seu próprio protótipo de Lixeira Inteligente com o uso da ferramenta Tinkercad e o uso do Arduino, Sensor Ultrassônico e Microservo.