Implementando Programas de Robótica Educacional: Capacitando Alunos para o Futuro
Quer saber como implementar um programa de Robótica Educacional em sua escola? Aqui você encontra a resposta!
Exclusivo: Primeiro Laboratório de Robótica das escolas públicas das regiões Sul e Sudoeste da Bahia é implementado em Itapetinga, em parceria exclusiva da InovaEdu.tech com a Secretaria Municipal de Educação do município
O primeiro Laboratório de Robótica das Escolas Públicas do Sul e Sudoeste da Bahia é inaugurado de forma exclusiva pela Secretaria Municipal de Educação de Itapetinga, em parceria com a InovaEdu.tech.
Acionando um LED automaticamente com sensor de luminosidade e Arduino
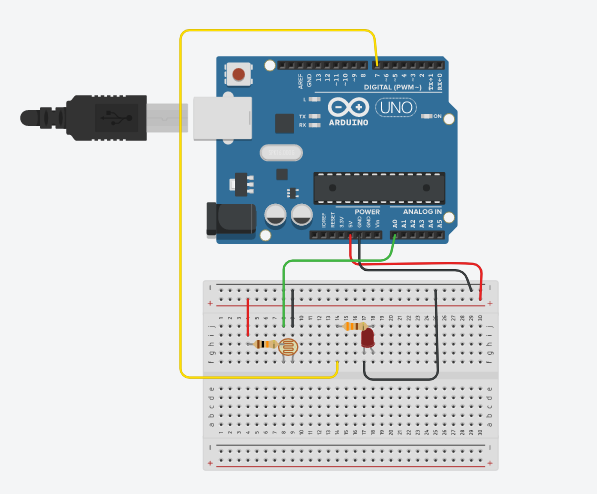
Neste artigo iremos apresentar mais um projeto de Robótica Educacional com Arduino. Projetaremos um circuito de acionamento de um LED mediante sensor de luminosidade. A lógica é simples: Se o ambiente estiver escuro, o LED irá acender automaticamente. Projeto super simples que você pode fazer e simular agora mesmo!
Criando a sua própria Lixeira Inteligente: Protótipo do Circuito Eletrônico da Lixeira (Parte 3)

Finalmente temos a terceira e última parte do nosso Artigo sobre a construção da Lixeira Inteligente. Vamos finalizar a construção da sua própria Lixeira Inteligente? Clique aqui e finalize já a sua!
Criando a sua própria Lixeira Inteligente: Protótipo do Circuito Eletrônico da Lixeira (Parte 2)
Daremos continuidade à nossa série sobre a construção da Lixeira Inteligente, que será composta por três artigos. Nessa Parte 2, iremos explanar sobre a montagem real do circuito eletrônico da Lixeira, atestando o seu funcionamento na prática.
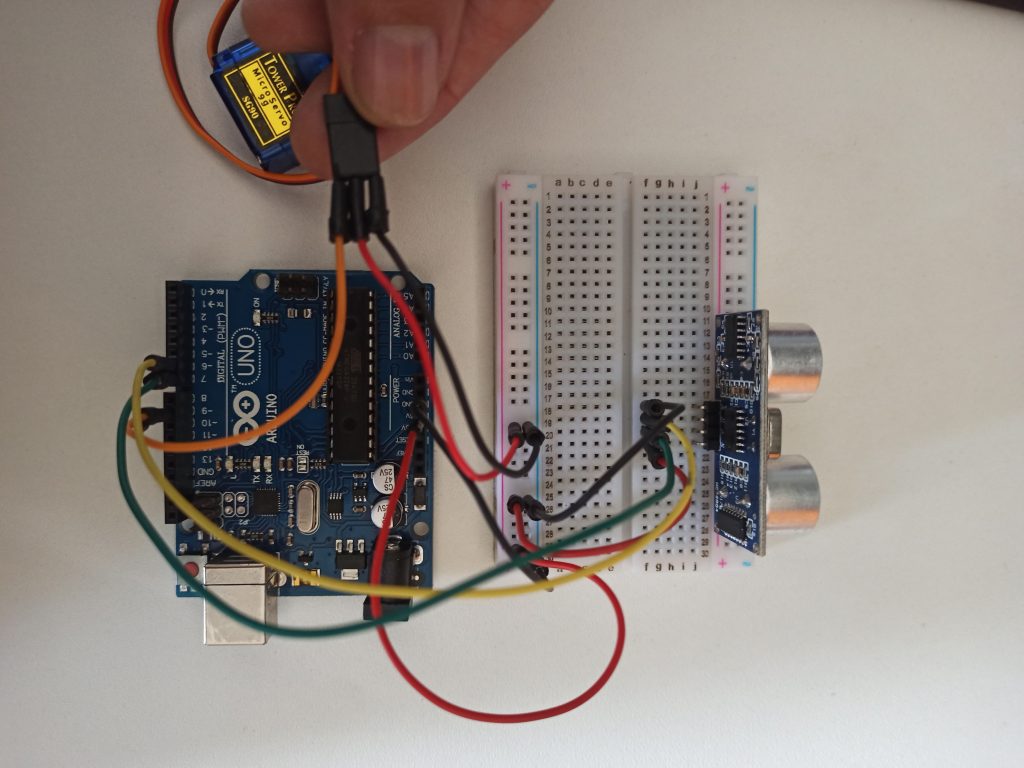
Criando a sua própria Lixeira Inteligente: Programação e simulação com Arduino e Tinkercad (Parte 1)
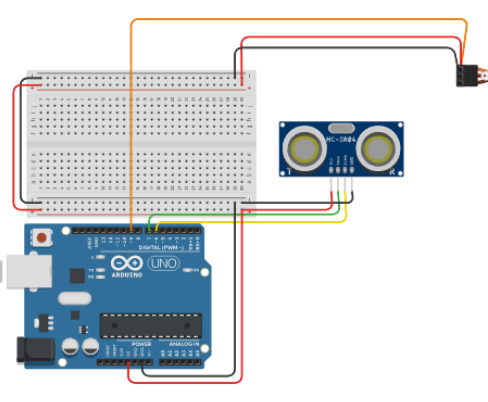
Neste primeiro artigo referente ao projeto da Lixeira Inteligente, você aprenderá como programar e simular o seu próprio protótipo de Lixeira Inteligente com o uso da ferramenta Tinkercad e o uso do Arduino, Sensor Ultrassônico e Microservo.