Saiba como preparar a sua rede de ensino para receber a Educação em tempo integral, com programas de Educação Digital e Robótica

Em um mundo cada vez mais conectado, a educação não pode se limitar às paredes da sala de aula. A Política Nacional de Educação Digital (PNED) surge como um farol, iluminando o caminho para a transformação da educação brasileira. Através da integração das tecnologias digitais ao currículo, a PNED abre portas para a formação integral dos alunos, preparando-os para os desafios e oportunidades do século XXI.
As Escolas em Tempo Integral: Um Campo Fértil para a Inovação
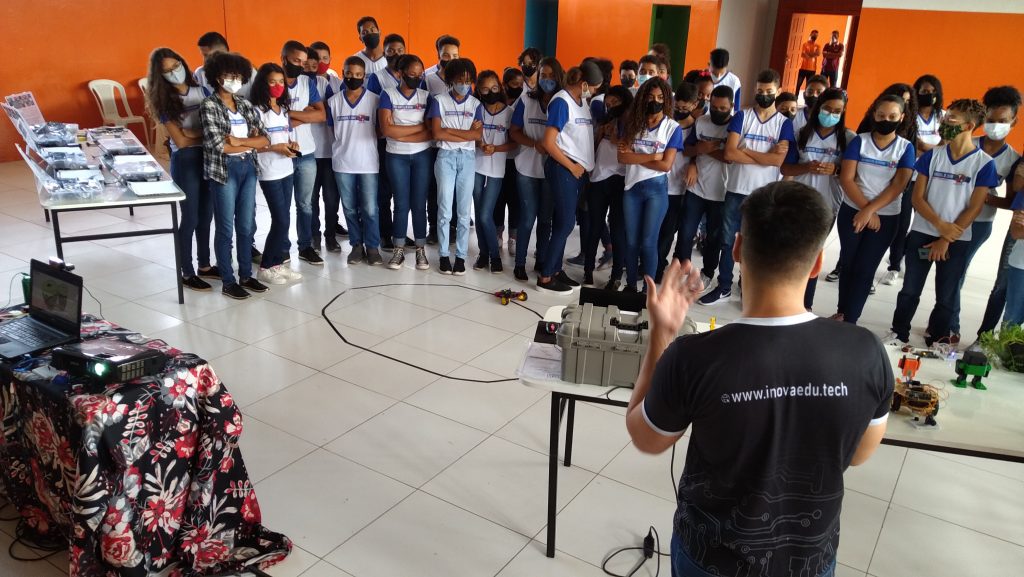
As escolas em tempo integral, presentes em todo o território nacional, configuram um terreno fértil para a implementação da PNED. Com uma carga horária ampliada, estas escolas oferecem flexibilidade curricular, permitindo a inserção de atividades e oficinas de educação digital no contraturno, complementando a formação dos alunos de forma inovadora e engajadora.
Oficinas Inovadoras para o Futuro
As oficinas de educação digital podem oferecer aos alunos uma imersão profunda em diferentes áreas, abrindo um leque de possibilidades para o aprendizado:
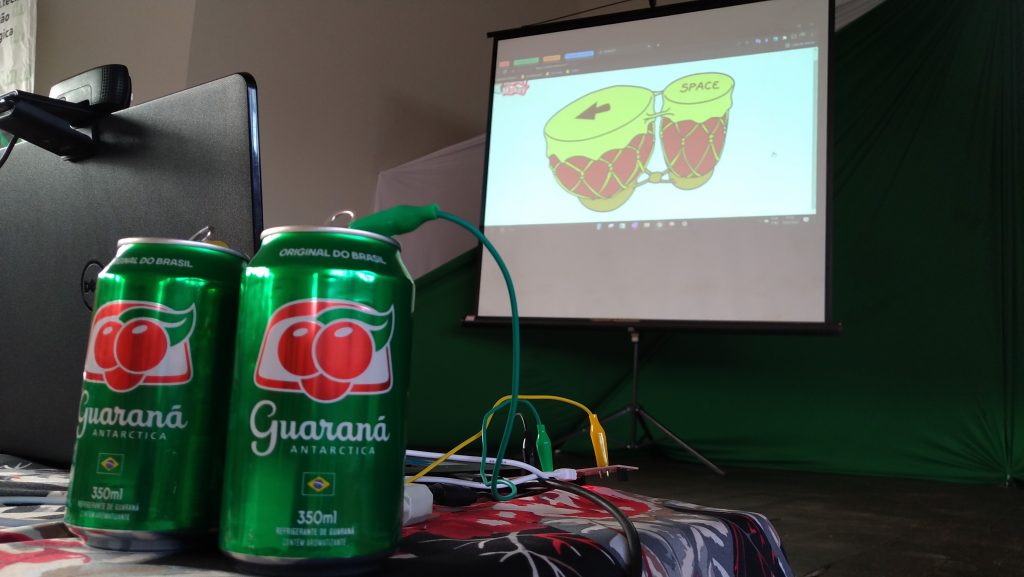
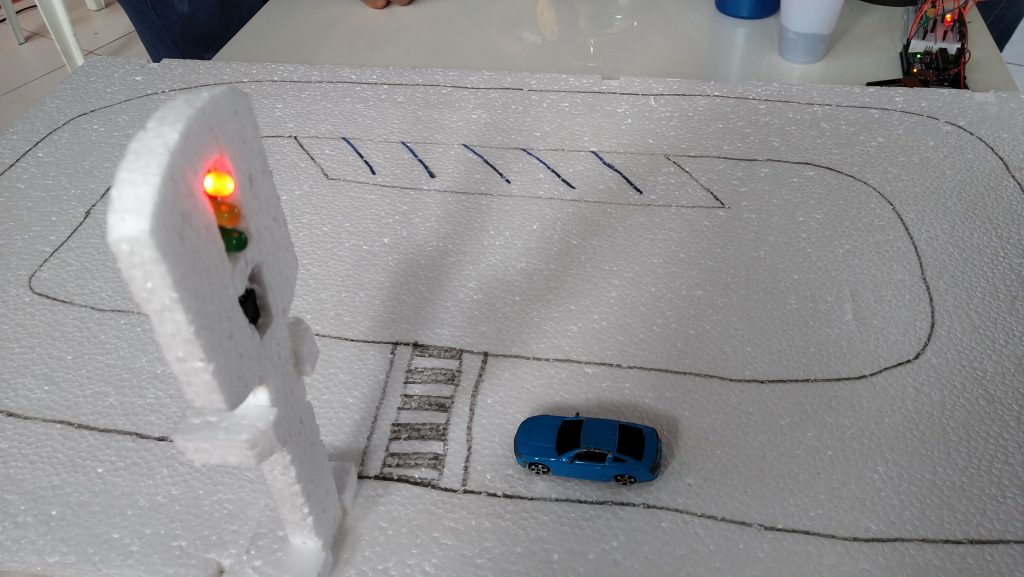
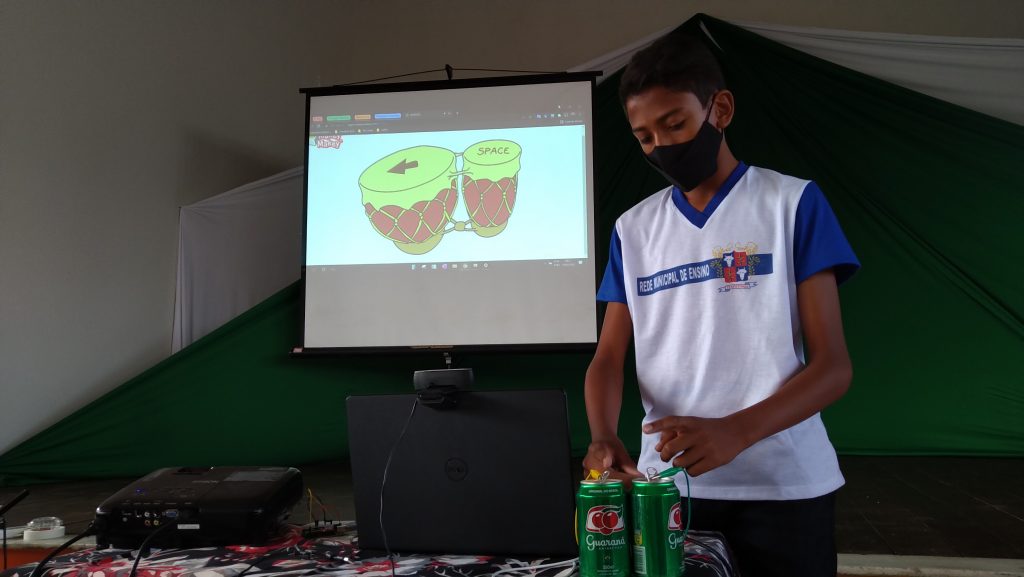
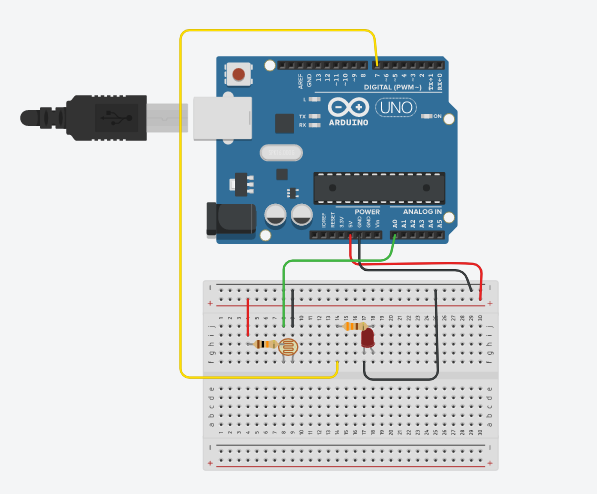
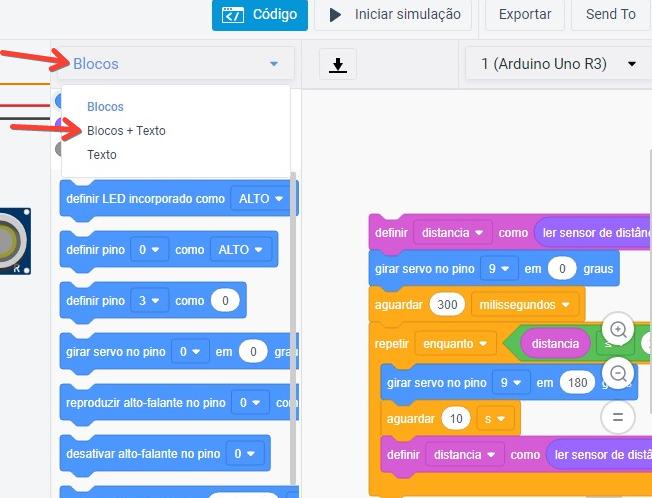
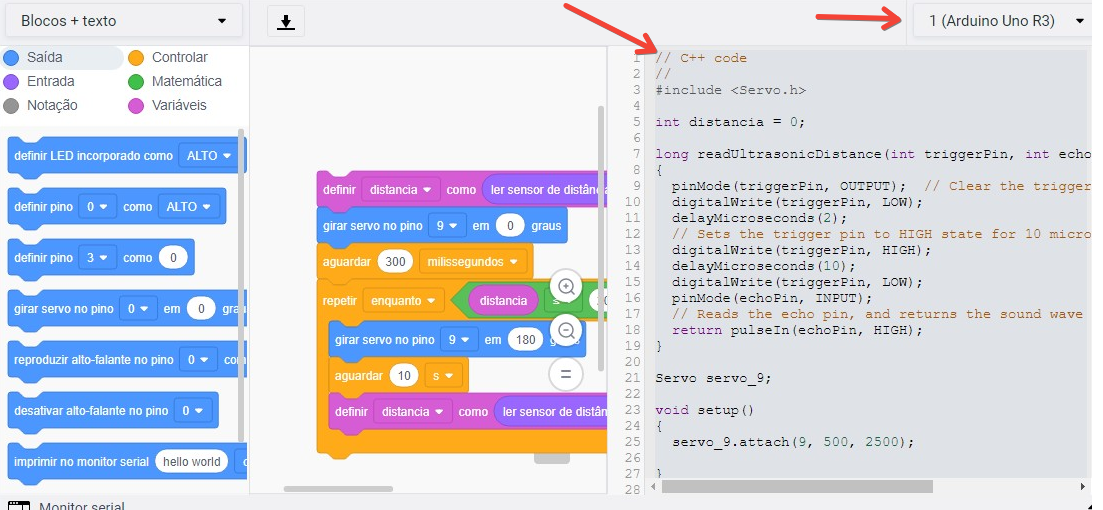
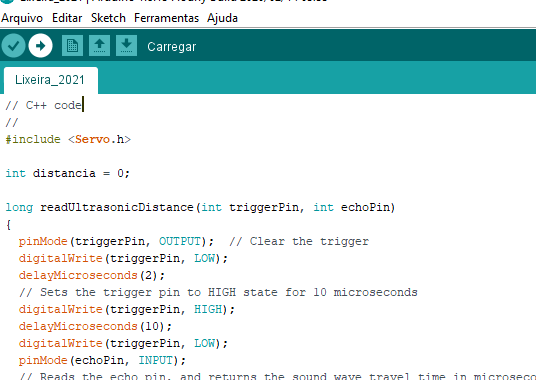
- Programação: Desenvolvendo o pensamento computacional, capacitando os alunos para criar soluções tecnológicas inovadoras e pensar como programadores.
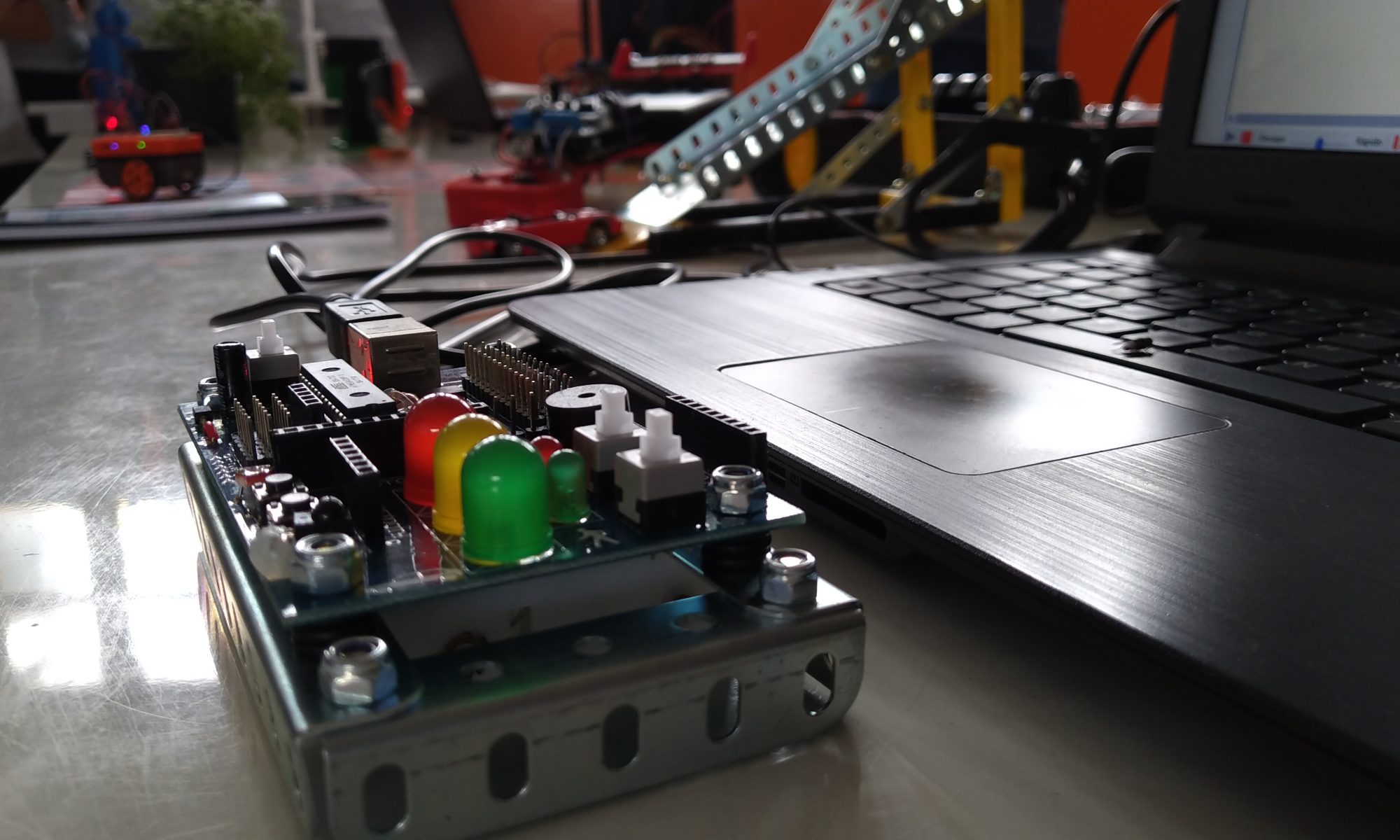
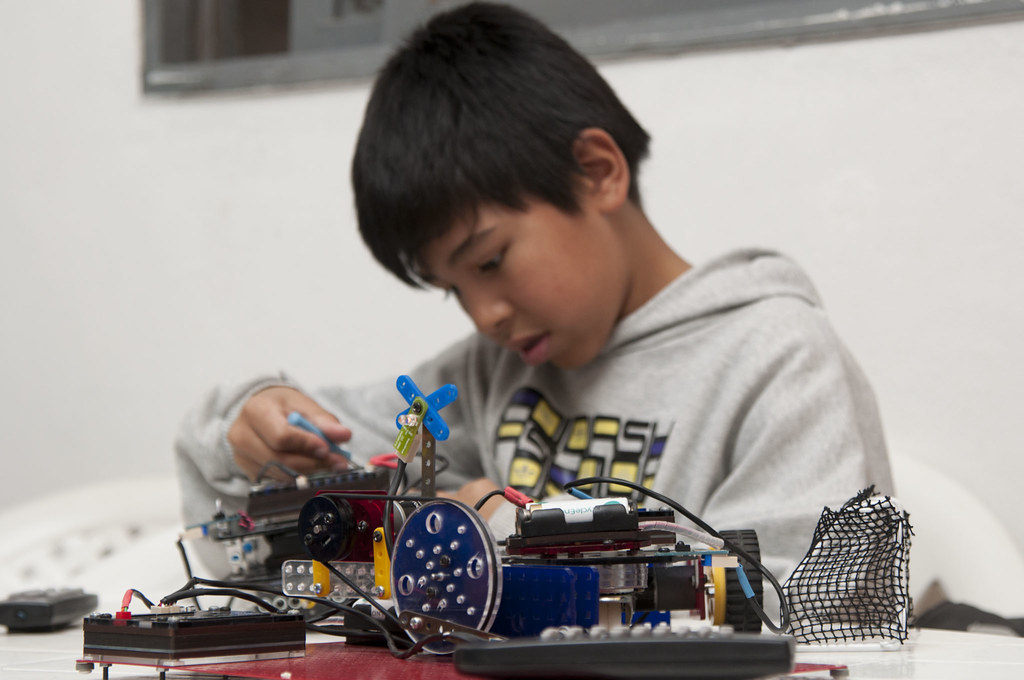
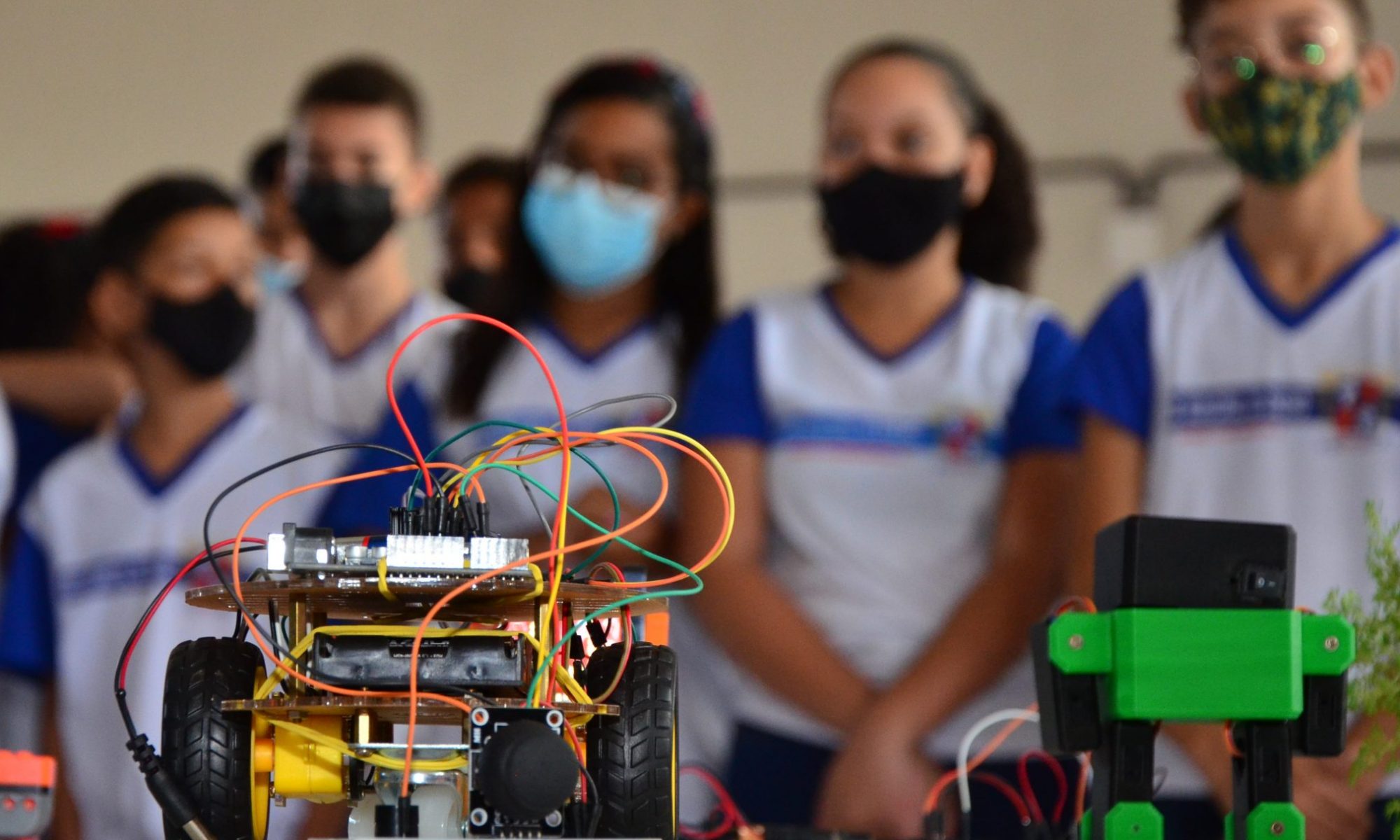
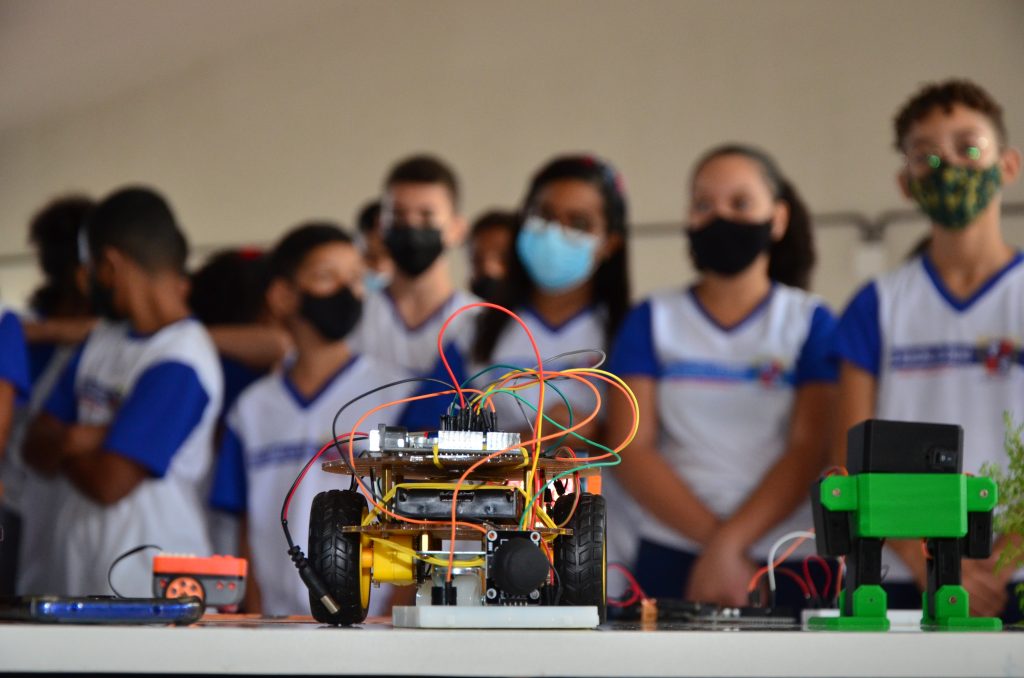
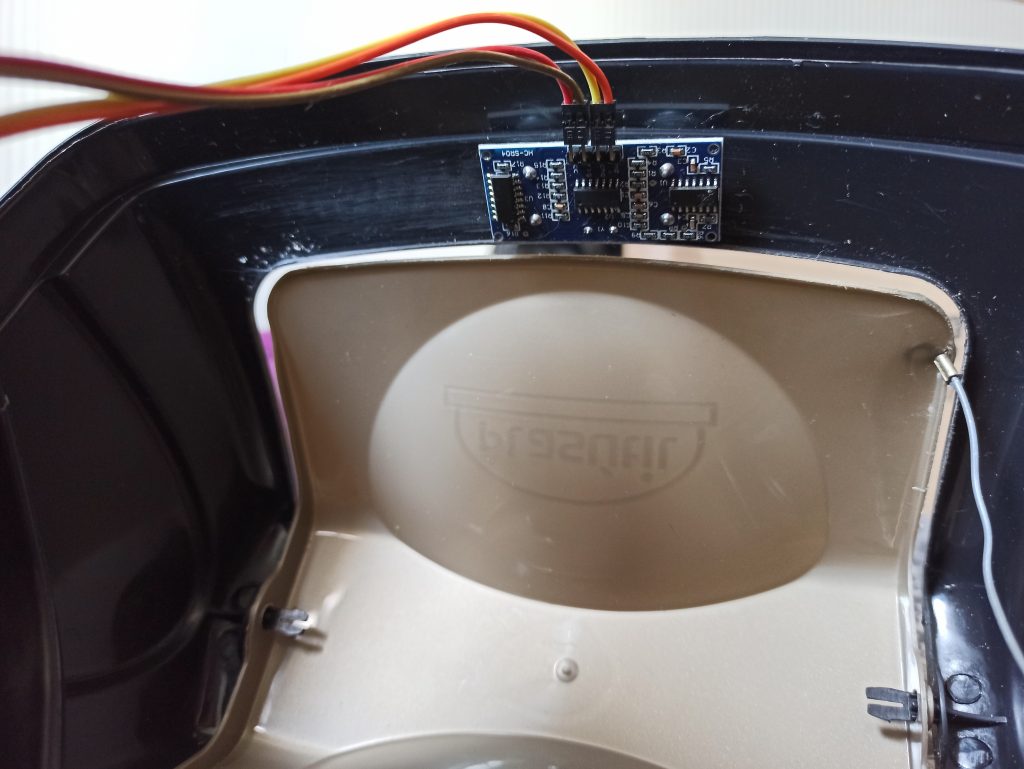
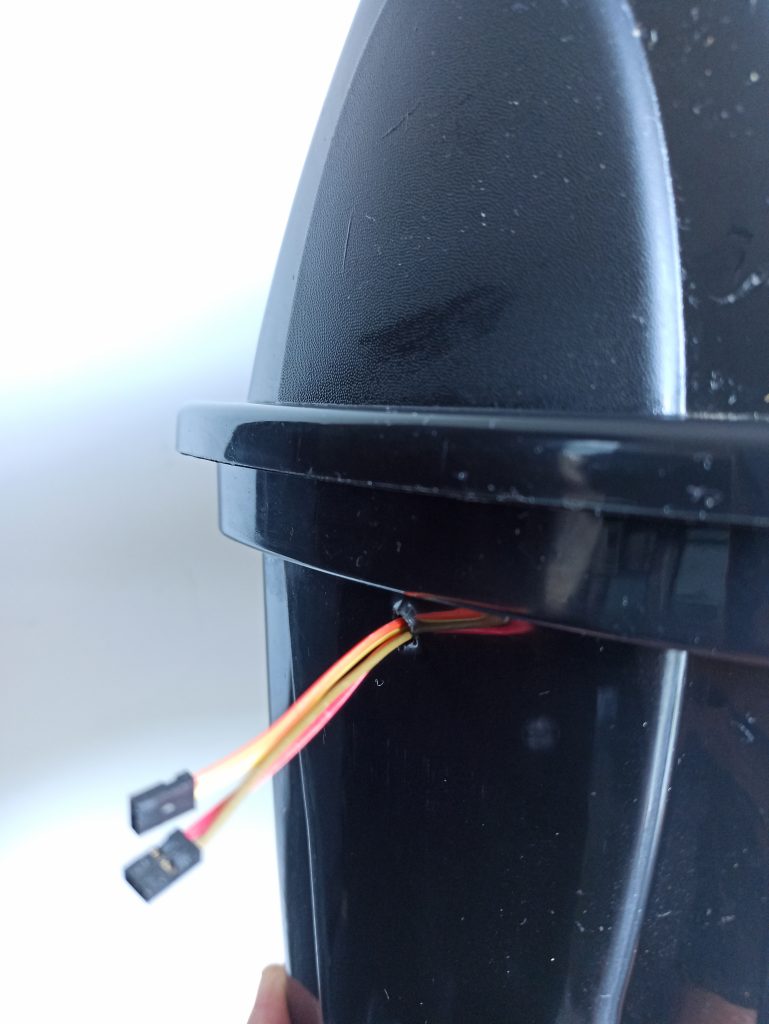
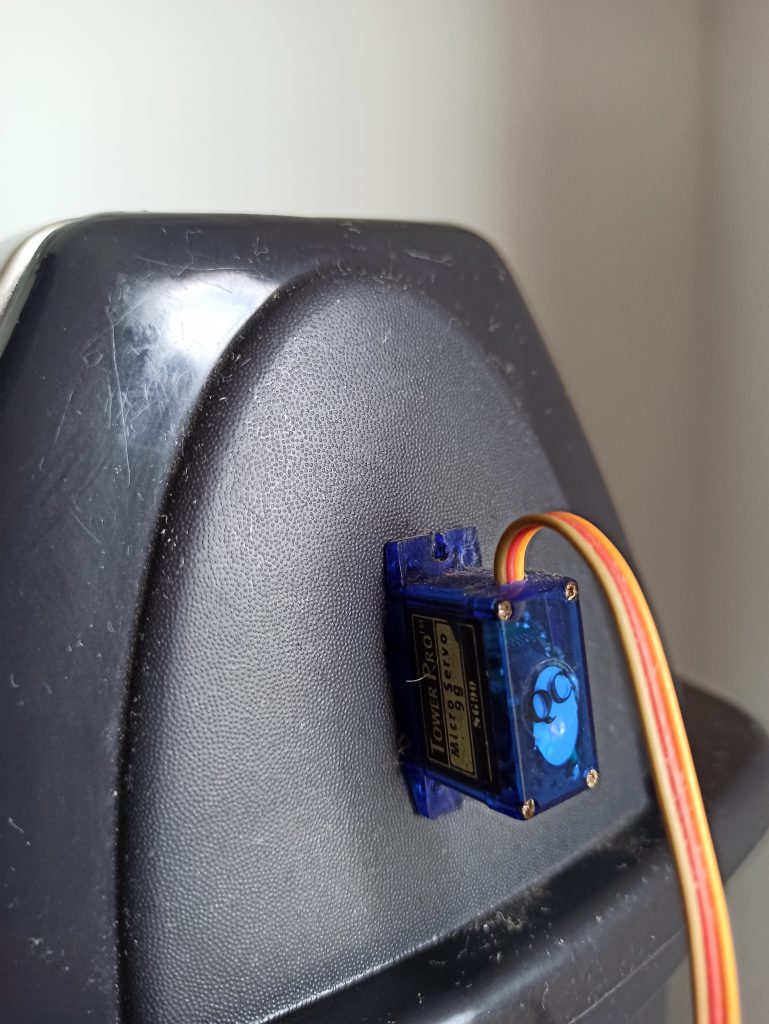
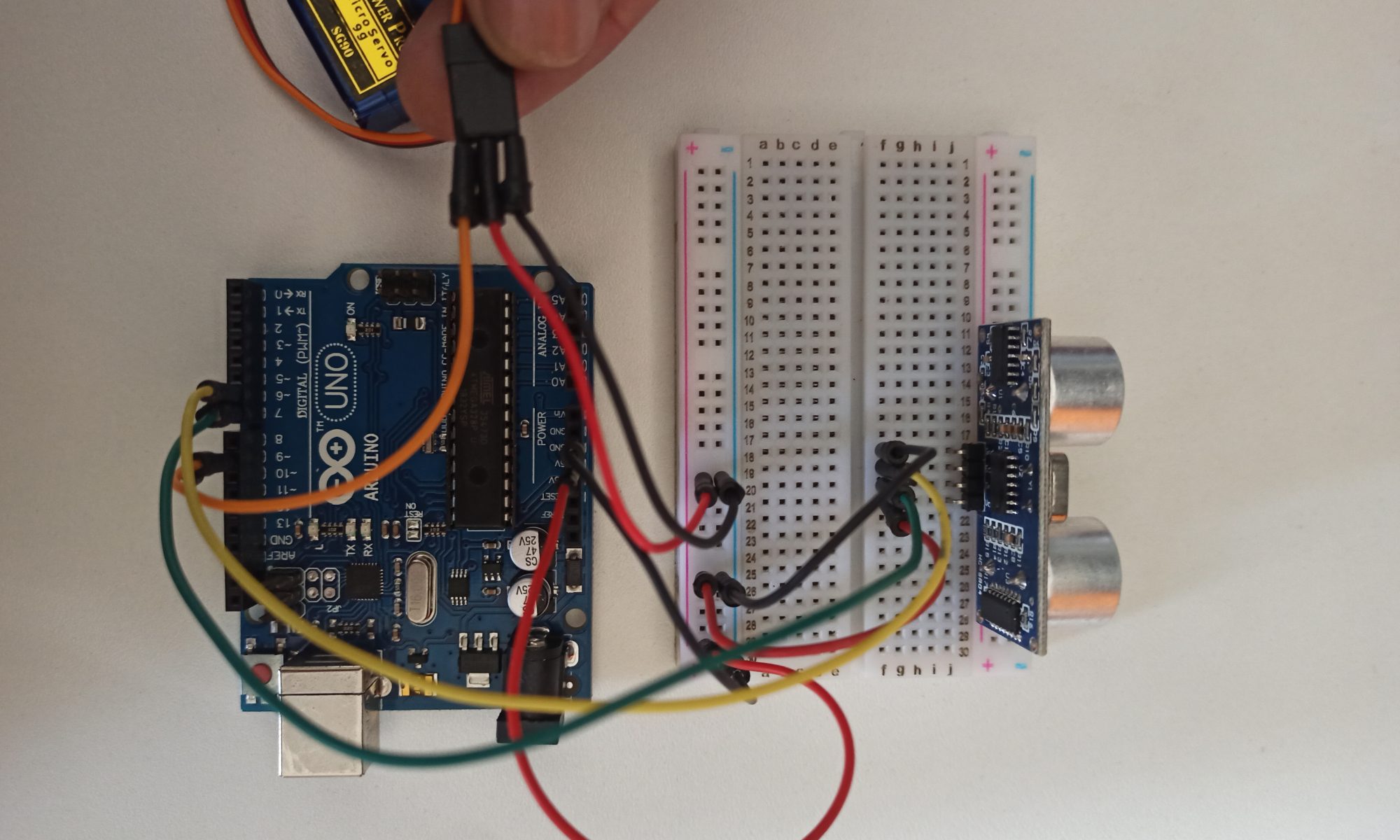
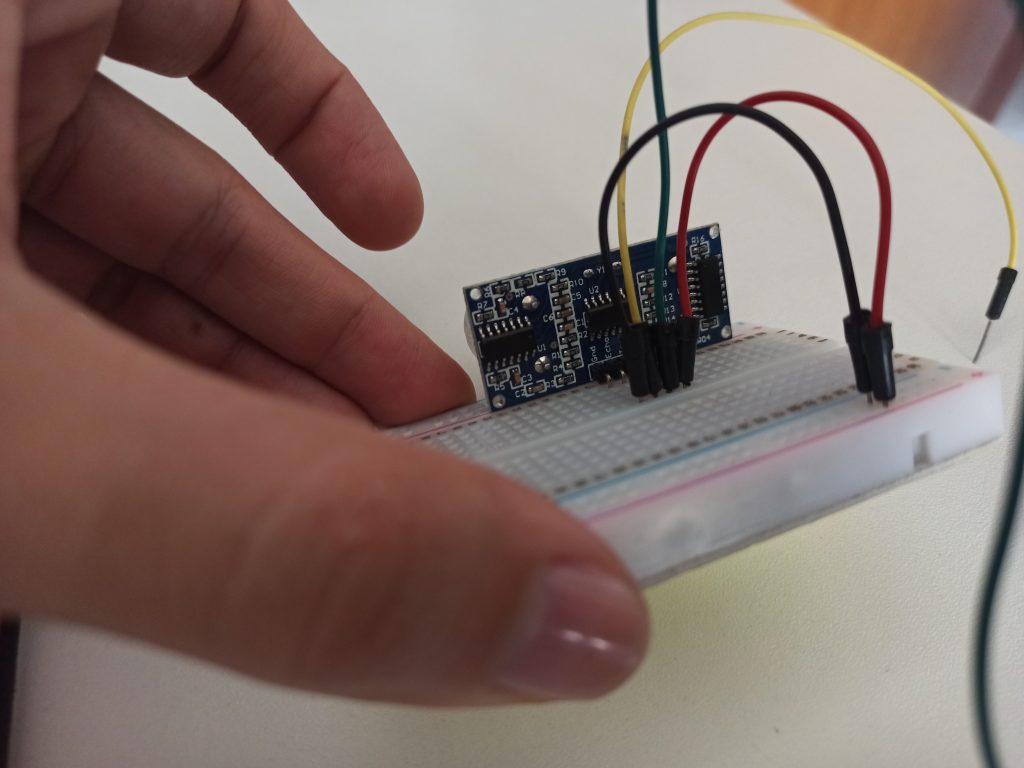
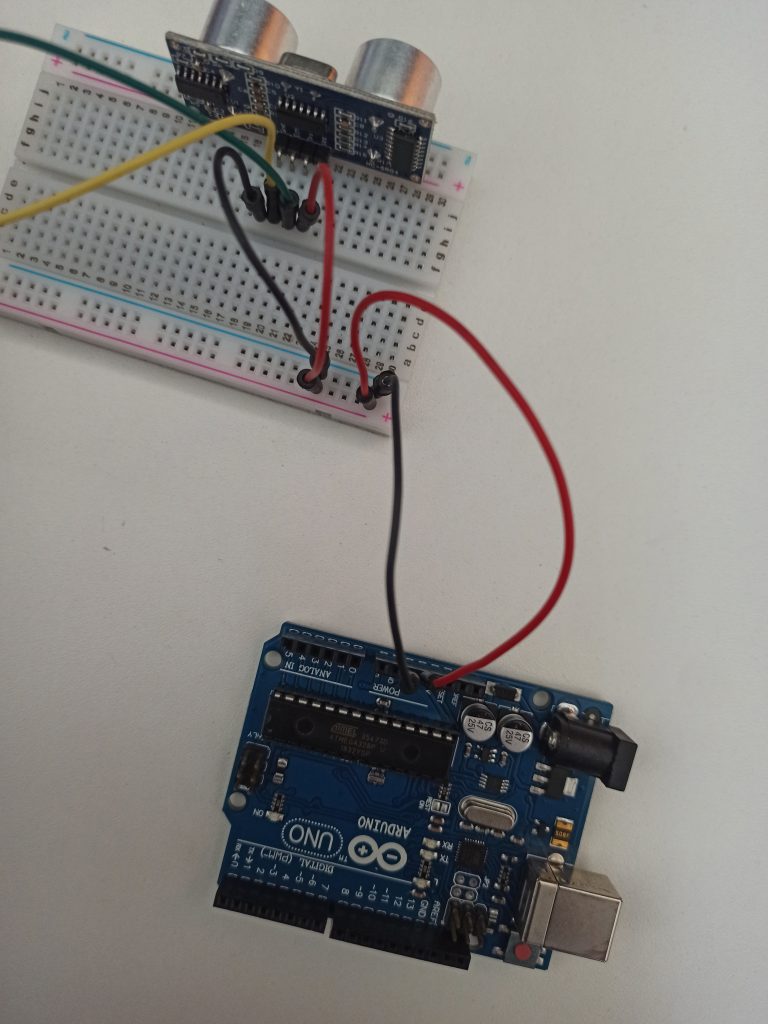
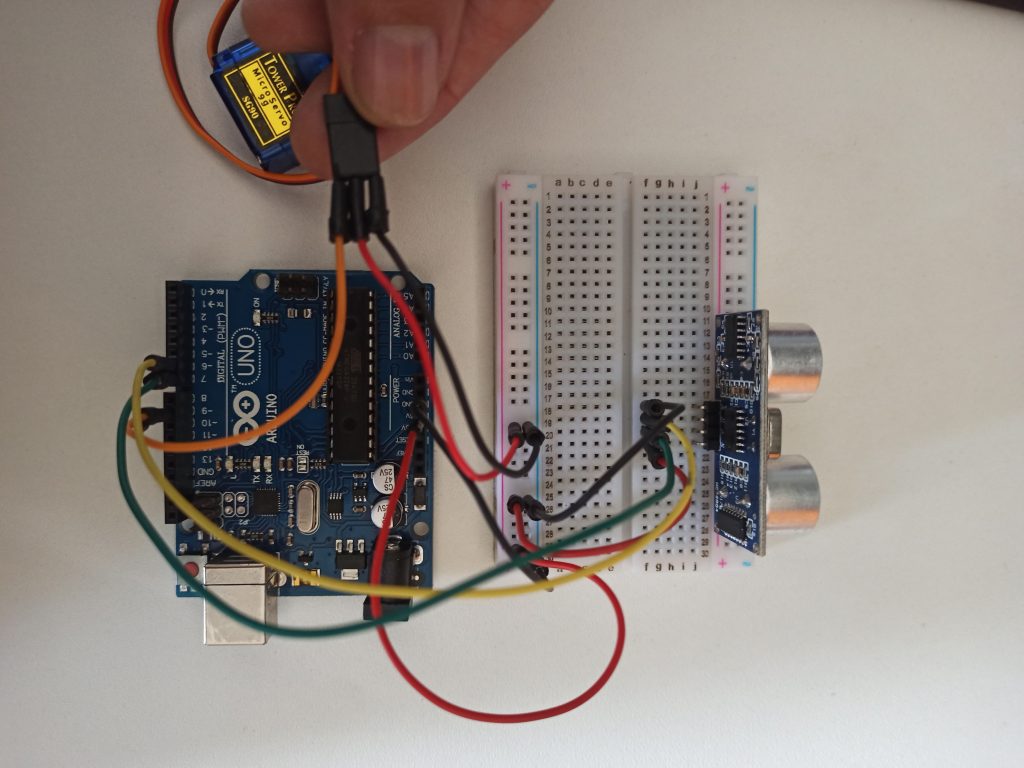
- Robótica: Estimulando a criatividade, a resolução de problemas e o trabalho em equipe, construindo robôs que interagem com o mundo real.
- Produção Audiovisual: Incentivando a comunicação, a expressividade e a produção de conteúdo digital, permitindo que os alunos utilizem as tecnologias para contar suas próprias histórias.
- Cultura Digital: Promovendo o uso consciente e ético das tecnologias, a segurança online e a cidadania digital, formando cidadãos críticos e responsáveis no mundo digital.
- Empreendedorismo Digital: Desenvolvendo habilidades de inovação, criatividade e planejamento de negócios, preparando os alunos para o mercado de trabalho do futuro.
A integração da educação digital à educação integral proporciona uma sinfonia de benefícios para os alunos, escolas e para o país como um todo:
Para os Alunos:
- Aprendizagem Ativa: Os alunos se tornam protagonistas de seu aprendizado, explorando as tecnologias de forma criativa, interativa e personalizada, assumindo o controle de sua própria jornada educacional.
- Desenvolvimento de Competências Essenciais: As oficinas contribuem para o desenvolvimento de habilidades digitais, pensamento crítico, criatividade, resolução de problemas e trabalho em equipe, preparando os alunos para as demandas do mercado de trabalho e para os desafios do futuro.
- Redução das Desigualdades: A inclusão digital oferece oportunidades para todos os alunos, independentemente de sua origem social ou localização geográfica, combatendo a exclusão digital e promovendo a equidade.
- Engajamento e Motivação: As oficinas podem aumentar o interesse dos alunos pela escola, combatendo a evasão escolar e promovendo um ambiente de aprendizado mais dinâmico e envolvente.
Para as Escolas:
- Inovação Pedagógica: As oficinas de educação digital permitem que as escolas implementem metodologias inovadoras e engajadoras, tornando o aprendizado mais significativo e relevante para os alunos.
- Melhoria da Qualidade da Educação: A integração das tecnologias digitais contribui para a melhoria dos resultados de aprendizagem, preparando os alunos para o sucesso acadêmico e profissional.
- Promoção da Inclusão: As oficinas podem ser adaptadas às necessidades específicas de cada comunidade, garantindo que todos os alunos tenham acesso a uma educação de qualidade.
Para o País:
- Preparo para o Futuro: A formação de cidadãos com competências digitais e habilidades do século XXI é essencial para o desenvolvimento do país e para a sua competitividade no cenário global.
- Redução das Desigualdades Sociais: A educação digital pode ser um instrumento poderoso para reduzir as desigualdades sociais e promover a inclusão social, oferecendo oportunidades para todos os brasileiros.
- Estímulo à Inovação: A integração da educação digital à educação integral pode fomentar a cultura da inovação e do empreendedorismo entre os jovens, impulsionando o desenvolvimento tecnológico e econômico do país.
A integração da educação digital à educação integral representa um passo fundamental para a construção de um futuro mais próspero e equitativo para o Brasil. Através da implementação da PNED nas escolas em tempo integral, podemos garantir que todos os alunos tenham acesso a uma educação de qualidade, desenvolvendo as habilidades necessárias para prosperar no mundo digital do século XXI.
Para que essa jornada seja eficaz, é fundamental o engajamento e a colaboração de todos os envolvidos:
- Governos: Investir em infraestrutura tecnológica, formação de professores e produção de conteúdo digital de qualidade.
- Escolas: Desenvolver projetos inovadores e engajadores que integrem as tecnologias digitais ao currículo.
- Professores: Buscar formação continuada para se apropriar das tecnologias digitais e utilizá-las de forma eficaz na sala de aula.
- Famílias: Incentivar o uso responsável das tecnologias digitais e apoiar o aprendizado dos alunos.
- Empresas: Estabelecer parcerias com escolas e universidades para o desenvolvimento de soluções tecnológicas para a educação.
Somente através da união de esforços poderemos construir um futuro onde a educação digital seja um direito de todos os brasileiros, abrindo portas para um mundo de oportunidades e possibilidades.
Referências:
- Política Nacional de Educação Digital: https://www.planalto.gov.br/ccivil_03/_Ato2023-2026/2023/Lei/L14533.htm
- Ministério da Educação: http://portal.mec.gov.br/
- Instituto Nacional de Estudos e Pesquisas Educacionais Anísio Teixeira (INEP): http://portal.inep.gov.br/
- Centro de referência em Educação à Distância (CEAD): [URL inválido removido]
Para saber mais:
- Artigo: A Era Digital na Educação: URL A Era Digital na Educação
- Vídeo: Educação Digital e o Futuro da Educação: URL Educação Digital e o Futuro da Educação
- Site: Movimento Todos pela Educação: URL Todos pela Educação
Lembre-se: A educação digital é um processo contínuo que exige atualização constante. É importante acompanhar as inovações tecnológicas e buscar novas formas de integrá-las à educação, para que os alunos estejam sempre preparados para os desafios do futuro.