Criando a sua própria Lixeira Inteligente: Programação e simulação com Arduino e Tinkercad (Parte 1)
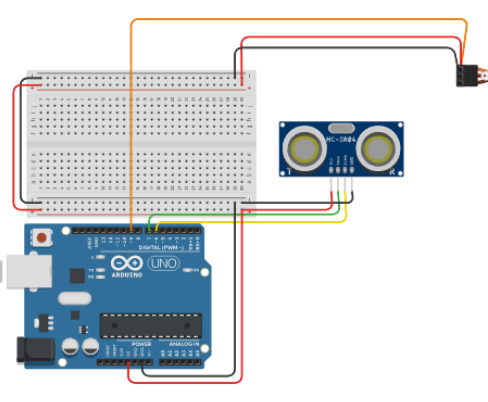
Neste primeiro artigo referente ao projeto da Lixeira Inteligente, você aprenderá como programar e simular o seu próprio protótipo de Lixeira Inteligente com o uso da ferramenta Tinkercad e o uso do Arduino, Sensor Ultrassônico e Microservo.